
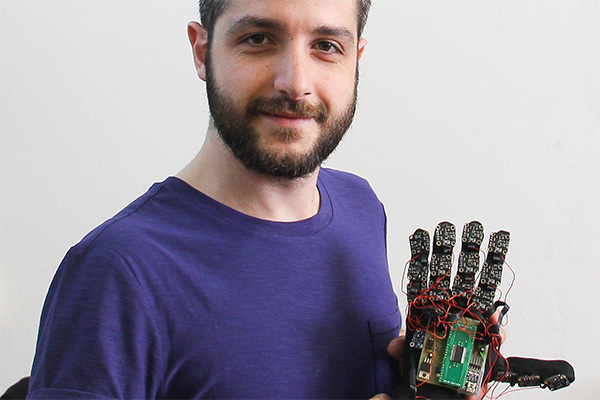
Il guanto elettronico ideato dal venticinquenne ingegnere informatico Emanuele Luberto, originario di Aradeo, è stato presentato con successo alla Conferenza Internazionale di Robotica a Seattle (Usa)
Se è vero che gli esami non finiscono mai, accade anche che un esame ti cambia la vita. Almeno questo è quanto accaduto ad Emanuele Luberto durante una sessione di esami di Robotica all’Università di Pisa nel 2014. Nel contesto del programma europeo PaCMan, in collaborazione con il “Centro E. Piaggio”, l’Università di Pisa ha sviluppato un guanto elettronico in grado di determinare l’effettiva postura di una qualsiasi mano robotica ma anche applicabile alla mano umana. Luberto ha sviluppato la tecnologia con un algoritmo che prende spunto dalla stabilizzazione dei droni per dare -prima a due falangi, e poi a tutta la mano- la postura effettiva di un arto. E l’algoritmo funziona talmente bene che l’Università decide di proporre un articolo su questa geniale innovazione all’IEEE (Institute of Electrical and Electronic Engineers), la più grande associazione al mondo di professionisti tra scienziati, ingegneri e matematici. E così si arriva ad ICRA, la Conferenza Internazionale di Robotica ed Automazione che quest’anno si è tenuta a Seattle, negli Stati Uniti. A fine ottobre 2014 è stato inviato l’articolo che supera le prime due selezioni, poi a febbraio a Luberto è stato comunicato che il progetto era stato selezionato per essere presentato durante la Conferenza del 26 maggio scorso. Inizia così per il giovane ingegnere salentino l’avventura negli Usa, di cui in questa intervista riportiamo alcuni aneddoti.
Un viaggio pieno di soddisfazioni, esperienze importanti a cui aggiungere anche la partecipazione alla gara di robotica promossa da Amazon.
Sì, Amazon che è uno dei promotori principali di ICRA sta da tempo cercando di realizzare dei magazzini automatizzati in cui dei robot siano in grado di afferrare oggetti dagli scaffali e depositarli nei cartoni. Costituiamo così un team di sei ingegneri, due meccanici e quattro robotici. Questi ultimi, tra cui ci sono anche io (il più piccolo del gruppo) ci occupiamo della visione, attraverso una telecamera a infrarossi ed rgb, e del controllo dei motori. Scriviamo ben 5mila righe di codice, con nottate intere passate in Facoltà per finire il lavoro. Quattro giorni prima della conferenza, però, dopo aver spedito il robot ci accorgiamo che questo era sparito. Quando siamo arrivati a Seattle abbiamo girato vari magazzini prima di trovarlo e con un carrellino abbiamo girato per tutta la città fino a raggiungere il nostro hotel.
L’esperienza per te più bella è, però, datata 28 maggio con la presentazione dell’articolo alla Conferenza Internazionale di Robotica ed Automazione.
È stata un’esperienza fantastica, straordinaria. In quella giornata ho esposto le nostre scoperte che hanno avuto un grandissimo risalto. Il mio algoritmo riguarda la sensorizzazione dell’intera mano robotica, applicando 17 IMU (Inertial Measurements Unit) in tutto, una per ogni falange più due poste sul dorso e sul polso della mano. I risultati hanno portato alla creazione di un guanto sensorizzato che permette di ricostruire la postura della mano, IMUglove. La cosa che più è stata apprezzata è l’uso di questi sensori 3mmx3mm già conosciuti e realizzati con tecnologia low cost, appena cento euro. Prima un guanto del genere veniva realizzato con la tecnologia motion capture, a costi elevatissimi.
Quali sono i campi di applicazione di questo guanto?
Potenzialmente, e visto che usa componenti a basso costo, ha applicazioni praticamente infinite: in medicina può guidare i robot a distanza; in fisioterapia per studiare i corretti movimenti che deve fare una mano dopo un trauma; a livello ludico per governare un videogioco al posto del joystick; come mouse per sfogliare le cartelle del computer.
Dal Salento agli Usa: l’avventura hi-tech di Emanuele Luberto
Partire dal Salento, da Aradeo per la precisione, e conquistare l’America con la propria innovazione: è il percorso virtuoso che è riuscito a compiere Emanuele, quando nel 2011 lascia l’Università del Salento con in tasca una laurea triennale in Ingegneria dell’Informazione alla volta di Pisa, prestigioso centro accademico, specializzazione robotica. Polo didattico “piccolo”, a misura d’uomo, dove il confronto tra docente ed allievo è diretto, con un laboratorio all’avanguardia, punta di diamante della ricerca scientifica e a stretto contatto con il “Centro E. Piaggio”.
Ed è qui che scatta la scintilla, durante il progetto europeo PaCMan (Probabilistic and compositional representation of objects for robotic manipulation) nato con lo scopo di permettere ad un robot la percezione, il riconoscimento e la manipolazione di oggetti di uso comune.
In questo contesto si sviluppa la “Pisa/IIT SoftHand”, una mano robotica in grado di adattarsi alla vastissima varietà di oggetti da toccare. Un solo motore, pulegge, molle e tendini che la rendono flessibile e robusta allo stesso tempo. Ma manca ancora qualcosa per ricalcare l’effettiva postura della mano. Così si sono aperte le porte degli States.
Alessio Quarta

